
الطائرات المسيّرة التعاونية… نحو إدراك بعيد المدى للعمق والرؤية ثلاثية الأبعاد
الجمعة، 27 فبراير 2026

تعتمد إحدى أكثر الطرق شيوعاً لتمكين الطائرات المسيّرة من إدراك العمق على محاكاة الكيفية التي يرى بها البشر والحيوانات العالم من حولهم، وذلك عبر “الرؤية المجسّمة”.
وتقوم هذه الفكرة على تثبيت كاميرتين تعملان كالعينين البشرية على متن الطائرة، بحيث تلتقط كل منهما المشهد من زاوية مختلفة قليلاً، ثم تتولى خوارزمية متخصصة تحليل الفروق بين الصورتين لاستخلاص العمق وتقدير المسافات.
ويُعد هذا النهج أكثر كفاءة من أنظمة الاستشعار النشطة مثل LiDAR، اختصاراً لتقنية (الكشف عن الضوء وتحديد مداه)، إذ يستهلك طاقة أقل بكثير، إلا أن الرؤية المجسّمة التقليدية تواجه تحدٍ أساسي يتمثل في أن مدى إدراك العمق يرتبط مباشرة بالمسافة الفاصلة بين الكاميرتين، وهو ما يحدّ من قدرتها على الرؤية بعيدة المدى.
ويعود ذلك إلى أن ما يعرف ب”اختلاف المنظر أو اختلاف زاوية الرؤية” (Parallax) يتضاءل كلما ابتعدت العناصر داخل المشهد. فعلى سبيل المثال، لن تتمكن غالباً طائرة مسيّرة مزودة بكاميرتين تفصل بينهما مسافة 10 سنتيمترات من إدراك العمق بدقة على مسافات تتجاوز 20 متراً تقريباً.
وهذا المدى يُعد محدوداً للغاية بالنسبة لطائرة سريعة الحركة تحتاج إلى التنقل في بيئات معقدة والاستجابة الفورية للعوائق والأجسام المتحركة.
وقد حاول باحثون سابقاً تجاوز هذه المشكلة عبر زيادة المسافة بين الكاميرتين، كأن توضعا على جناحي طائرة ثابتة الجناحين غير أن هذا الحل يعتمد أساساً على منصات كبيرة الحجم، ما يجعله غير قابل للتطبيق على الطائرات المسيّرة الصغيرة بسبب القيود الفيزيائية المرتبطة بالحجم والوزن.
وفي مواجهة هذا التحدي، توصّل البروفيسور المساعد في الروبوتات بجامعة محمد بن زايد للذكاء الاصطناعي، زينغزينغ زو، بالتعاون مع الباحثين تشاويينغ وانغ ووي دونغ من جامعة شنغهاي جياو تونغ، إلى مقاربة مبتكرة تقوم على سؤال بسيط: إذا لم تكن طائرة واحدة كافية، فلماذا لا نستخدم طائرتين؟
وبدلاً من توسيع المسافة بين الكاميرتين على الطائرة نفسها، اعتمد الفريق على توزيع الكاميرتين على طائرتين مسيّرتين تتحركان بتنسيق مشترك أثناء الطيران.
ومع توسيع “خط الأساس” بين الكاميرتين من 10 سنتيمترات إلى ثلاثة أمتار، أصبح النظام – الذي يحمل اسم “الرؤية التعاونية المجسمة الطائرة” قادراً على إدراك العمق بدقة حتى مسافة 70 متراً، أي بزيادة تصل إلى 350% مقارنة بأنظمة الكاميرات المجسّمة التجارية الشائعة مثل RealSense.
ويقول زوو: “إنها طائرات مسيّرة تعاونية تمتلك قدرة بعيدة المدى على إدراك العمق باستخدام الرؤية المجسّمة لتحديد الأبعاد الحقيقية للعالم المحيط”.
غير أن تحويل هذه الفكرة إلى نظام عملي قابل للتطبيق تطلّب من زوو وفريقه البحثي تجاوز مجموعة من التحديات التقنية المعقدة. وقد نشر الباحثون مؤخراً دراسة علمية حول هذا العمل في دورية معهد مهندسي الكهرباء والإلكترونيات المتخصصة في أبحاث الروبوتات.
تحديات خط الأساس الديناميكي
في أنظمة الرؤية المجسّمة التقليدية، تكون الكاميرات ثابتة في مواقع معروفة، ما يعني أن المسافة والزوايا بينها لا تتغير، أما في حالة توزيع الكاميرات على طائرتين مستقلتين تتحركان باستمرار، فإن المسافة النسبية بينهما تتغير بصورة متواصلة – ولو بشكل طفيف – أثناء الطيران.
ولكي يتمكن النظام من تفسير البيانات البصرية بشكل صحيح، كان على الباحثين تحديد الموقع النسبي للطائرتين بدقة تصل إلى مستوى المليمتر، وفي الزمن الحقيقي، مع الأخذ بعين الاعتبار محدودية القدرة الحاسوبية وسعة الاتصال على متن الطائرات.
ولحل هذه المعضلة، طوّر الفريق إطاراً متكاملاً أطلق عليه اسم:
“الرسم الخرائطي المجسّم التعاوني بخط أساس ديناميكي” (CDBSM)، وهو إطار يتألف من ثلاثة مكونات رئيسية.
أولاً، زُوّدت الطائرات بكاميرات جانبية ومستشعرات تعمل بالأشعة تحت الحمراء لمراقبة الطائرة المرافقة. ويصف الباحثون هذه المنظومة باسم:
“منظومة تقدير هجينة للموقع والحركة والمدى تعتمد على البيانات البصرية ثنائية الطيف (DS-VIRE)” وهي آلية تقدير هجينة تدمج البيانات البصرية والحرارية مع قياسات المدى فائقة الاتساع للحصول على تقدير دقيق للغاية للمسافة بين الطائرتين.
أما المكون الثاني، فيعتمد على كاميرات أمامية لتتبع العناصر البصرية داخل المشهد. ولكي يتم حساب العمق، يجب أن تتعرف الطائرتان على المعالم نفسها – مثل زوايا المباني أو الحواف البارزة – ضمن صورتيهما المختلفتين.
وتُعرف هذه العملية باسم “مطابقة السمات”، وهي عملية معقدة لأن زاوية الرؤية بين الطائرتين تتغير باستمرار أثناء الطيران.
وتوجد بالفعل أنظمة ذكاء اصطناعي متقدمة مثل SuperPoint و SuperGlue القادرة على تتبع هذه المعالم حتى مع اختلاف زوايا التصوير، إلا أن تشغيلها على كل إطار فيديو يتطلب قدرة حوسبية تفوق ما تستطيع الطائرات الصغيرة توفيره.
ولذلك، طور الباحثون نهجاً هجينا يجمع بين الدقة والكفاءة؛ إذ تُشغَّل خوارزميات SuperPoint وSuperGlue بصورة دورية، بينما يُستخدم بين هذه الفترات أسلوب أسرع وأبسط يُعرف بـ “التدفق البصري” لتتبع حركة المعالم بين الإطارات المتتالية.
وبهذا، توفر الخوارزميات المعتمدة على الذكاء الاصطناعي توجيهاً دورياً عالي الدقة، بينما يتولى التدفق البصري التنبؤ السريع في الزمن الحقيقي.
يشرح هذا الفيديو نظام “الرؤية التعاونية المجسّمة الطائرة”(Flying Co-stereo)، الذي يستخدم كاميرات مجسّمة مثبتة على طائرتين مسيّرتين لإدراك العمق وإعادة بناء المشهد ثلاثي الأبعاد على مسافات بعيدة.
من الرؤية الثنائية إلى الفهم ثلاثي الأبعاد
وبعد تحديد الموقع النسبي للطائرتين والتأكد من تطابق السمات البصرية التي ترصدها كل منهما، ينتقل النظام إلى إعادة بناء المشهد ثلاثي الأبعاد اعتماداً على مبادئ الرؤية المجسّمة والتثليث الهندسي لحساب مواقع مجموعة من النقاط المرجعية المتفرقة داخل المشهد بدقة عالية.
ويقوم النظام بحساب الموقع الدقيق لعدد محدود من “المعالم أو النقاط المرجعية المتفرقة” داخل المشهد. ويُطلق عليها هذا الاسم لأن عددها لا يتجاوز نحو 200 نقطة ضمن صورة تحتوي على أكثر من 300 ألف بكسل.
وفي هذه المرحلة، تكون تقديرات العمق نسبية فقط؛ أي إن النظام يستطيع معرفة أن جسماً ما أقرب من آخر، لكنه لا يستطيع تحديد المسافة الفعلية بالأمتار.
ولتحويل هذه التقديرات إلى قياسات حقيقية، استخدم الباحثون نموذج الذكاء الاصطناعي “DepthAnythingV2″، الذي يترجم العمق النسبي إلى مسافات فعلية قابلة للقياس.
وبحسب الدراسة، نجح النظام في إنتاج خرائط ثلاثية الأبعاد كثيفة يصل مداها إلى 70 متراً، مع معدل خطأ نسبي يتراوح بين 2.3% و9.7%، ويمثل ذلك تفوقاً يصل إلى 350% في مدى الإدراك، و450% في مساحة التغطية مقارنة بأنظمة الرؤية المجسّمة التقليدية.
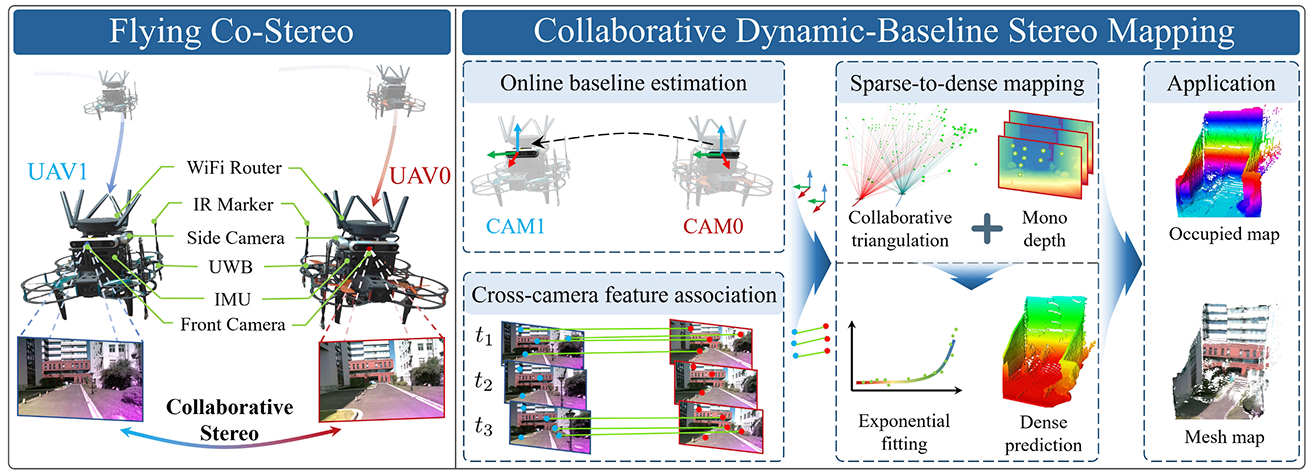
البنية المعمارية لنظام “الرؤية التعاونية المجسمة الطائرة” المقترح لإعادة البناء ثلاثي الأبعاد باستخدام طائرات مسيّرة تعاونية.
كما نظر الباحثون في اختيار الطول الأمثل لـ “خط الأساس” بين الطائرتين بهدف تقليل الخطأ الكلي في إعادة البناء ثلاثي الأبعاد للنقاط المرجعية. فكلما زادت المسافة بين الطائرتين، تحسنت دقة التثليث الهندسي والاستقرار العددي للحسابات، غير أن ذلك يؤدي في الوقت نفسه إلى زيادة صعوبة الرصد البصري المتبادل بين الطائرتين، ما يقلل من دقة تقدير موقع كل منهما بالنسبة للأخرى.
طائرات المستقبل… لا تكتفي بالطيران
يرى زوو أن لهذه التقنية تطبيقات واعدة في مجالات متعددة مثل الخدمات اللوجستية، وعمليات البحث والإنقاذ، ورسم الخرائط الدقيقة للمدن والبيئات المعقدة، إلى جانب دعم التخطيط الاستباقي للمهام بعيدة المدى، لكن الطموح المستقبلي للطائرات المسيّرة يتجاوز مجرد التنقل داخل الفضاء.
ويقول: “في المستقبل، لن تقتصر مهام الطائرات المسيّرة على التحليق داخل البيئات المختلفة، بل ستصبح قادرة على التفاعل معها لذا نسعى لأن تتمكن هذه الطائرات من الإمساك بالأشياء وتحريكها والتعامل مع العالم المادي من حولها، وهذا النوع من التفاعل يتطلب فهماً دقيقاً وثلاثي الأبعاد للعالم”.
أخبار ذات صلة
ديزين سونغ: من مختبرات الروبوتات إلى إعداد قادة الذكاء الاصطناعي
من تأسيس قسم الروبوتات إلى إعداد قادة الذكاء الاصطناعي المستقبليين، يقود البروفيسور ديزين سونغ جامعة محمد بن.....
- الابتكار ,
- الروبوتات ,
- هيئة تدريسية ,
- OSPA ,
- نائب عميد الجامعة ,

الشبكات العصبية تُحدث نقلة نوعية في التحكم بالروبوتات المرنة وتُوسّع آفاق استخدامها
سيزار ستيفانيني من جامعة محمد بن زايد للذكاء الاصطناعي يعزز التحكم في الروبوتات المرنة عبر مقاربة مدعومة.....
- الشبكات العصبية ,
- control ,
- ICRA ,
- soft robotics ,
- التحكم ,
- الروبوتات المرنة ,
- neural networks ,
- المؤتمرات ,
- robotics ,
- conference ,
- الروبوتات ,

رحلة إصرار ومثابرة من التعلم الذاتي إلى البحث المتقدم...إبراهيم السراج ينطلق في عالم الروبوتات المرنة
من الدورات الإلكترونية إلى الأبحاث المتقدمة، يعكس الصعود السريع لإبراهيم السراج مسار نمو قسم الروبوتات في جامعة.....
- حفل التخرج ,
- البحوث ,
- الخريجون ,
- الدكتوراه ,
- علم الروبوتات ,
- ماجستير العلوم ,
- دفعة 2026 ,