
نوع جديد من الأسماك الروبوتية يغوص بالتعلم العميق إلى أعماق البحار ويحصد جوائز عالمية
الاثنين، 16 مارس 2026

تمتلك الروبوتات ذاتية التشغيل تحت الماء، القادرة على الوصول إلى أماكن يتعذر على الغواصين البشر بلوغها وجمع البيانات حول المنظومات البيئية البحرية، إمكانات كبيرة لتقديم فوائد مهمة لعلماء الأحياء البحرية وغيرهم من الباحثين الذين يدرسون المحيطات.
ولكن العمل في البحر يفرض تحديات عديدة، حتى على الروبوتات. فالاتصال تحت الماء صعب، كما أن الأساليب الشائعة للتحكم في الروبوتات وتحديد مواقعها لا تعمل بكفاءة تحت السطح. بالإضافة إلى ذلك، غالباً ما تُصدر المركبات الروبوتية التقليدية تحت الماء ضوضاء من أنظمة الدفع والاتصال الخاصة بها، وهي ضوضاء يمكن أن تنتقل لمسافات طويلة وتؤثر سلباً في النظم البيئية التي يفترض أن تراقبها.
في هذا السياق، حصل ثلاثة باحثين يقيمون في أبوظبي على جائزة الشيخ حمدان بن زايد للأبحاث البيئية تقديراً لنجاحهم في تطوير نظام روبوتي يعمل تحت الماء لمعالجة هذه التحديات. ويتكون النظام من مجموعة من الأسماك الروبوتية القادرة على السباحة والتواصل والعمل معاً على جمع البيانات من البيئات المائية دون الحاجة إلى تدخل بشري. وقد أطلق عليه الباحثون اسم “سرب الأسماك الروبوتية”، ويُشار إليها اختصاراً بالحروف الإنجليزية “H-SURF”.
وقد أُجري البحث في جامعة خليفة، بتمويل من معهد الابتكار التكنولوجي. وكان الباحثون الرئيسيون فيه البروفيسور سيزار ستيفانيني، الأستاذ في قسم علم الروبوتات بجامعة محمد بن زايد للذكاء الاصطناعي، وفيديريكو ريندا من جامعة خليفة، وجوليا دي ماسي من جامعة السوربون أبوظبي، حيث تمثّل دور ستيفانيني في وضع الفكرة وقيادة تطوير هذا النوع الجوع الجديد من الروبوتات.
ابتكارات متكاملة
لا يكمن تميز نظام “H-SURF” في ابتكار تكنولوجي واحد بعينه، بل في تكامل مجموعة من الابتكارات في مجالات مختلفة.
أول هذه الابتكارات هو الروبوتات المستوحاة من الطبيعة، حيث صُممت روبوتات نظام “H-SURF” على هيئة أسماك بأجسام انسيابية وزعانف ومراوح تتيح لها الحركة بسلاسة وبطريقة تحاكي الطبيعة، مع قدرتها في الوقت نفسه على الغوص والصعود إلى السطح وتفادي العوائق. وفي هذا الشأن يقول ستيفانيني: “إذا أردنا التفاعل مع الكائنات الحية، فعلينا أن نفهمها. فمثلاً، لا يمكننا إحداث ضوضاء غير ضرورية في المحيط، وإلا سنؤثر على الحياة البحرية”.
كما يمكن لهذه الروبوتات التواصل فيما بينها باستخدام الضوء بدلاً عن الصوت، مما يقلل من الضوضاء، وهي طريقة مستوحاة من أساليب التواصل لدى بعض أنواع الأسماك.

تصميم روبوتات نظام “H-SURF” التي تعمل جماعياً كسرب واحد
ويشير ستيفانيني إلى أن الطبيعة ليست دائماً المصدر الأمثل للإلهام في حل تحديات التصميم. فمثلاً، لا وجود للطائرات في الطبيعة. ومع ذلك، يظل علم الأحياء نموذجاً قيّماً عند تصميم أنظمة روبوتية لبيئات معقدة، لأن الكائنات الحية طورت عبر ملايين السنين أساليب فعّالة للتعامل مع التعقيدات.
أما الابتكار الثاني فيتعلق بذكاء الأسراب، حيث تُوجَّه هذه الروبوتات باستخدام ما يُعرف بخوارزميات التحكم في الأسراب، التي تمكّنها من التحرك جماعياً كوحدة واحدة. ولا تعتمد حركة كل روبوت على موقعه الفردي أو على وجود روبوت قائد، بل على موقعه النسبي مقارنة ببقية الروبوتات ضمن السرب.
وكما يوضح الباحثون في دراسة حول “H-SURF“، يتميز هذا النهج بكفاءة حسابية عالية ويتطلب تبادل حد أدنى من البيانات بين الروبوتات. ويضيف ستيفانيني: “حتى باستخدام تعليمات برمجية ومعالجة حسابية بسيطة، يمكن للسرب تنفيذ مهام جماعية معقدة، حيث تتصرف الروبوتات كما لو كانت روبوتاً واحداً كبيراً يعمل بشكل متكامل”.
كما طوّر الباحثون نموذجاً للتعلّم التعزيزي القائم على أنظمة مساعدة متعددة، وتبين أنه عندما تتعاون الروبوتات فيما بينها، يمكنها إيجاد أساليب لفحص أنبوب تحت الماء بسرعة أكبر مقارنة بما يمكن أن يحققه روبوت واحد يعمل بشكل منفرد.
عيون في الماء
الابتكار الثالث هو الرؤية الحاسوبية المدمجة، وهو محور أحدث دراسة للفريق حول نظام “H-SURF”. فقد زوّد الباحثون هذه الروبوتات بشبكة عصبية ترشيحية خفيفة تعتمد على الكاميرات الأمامية والجانبية للروبوتات للتعرّف على الأنواع البحرية بشكل آني دون الحاجة إلى الاتصال بخوادم خارجية. كما تسهم هذه الشبكة العصبية في تنسيق العمل بين الروبوتات ضمن السرب.
ويستند هذا النموذج إلى إصدار حديث من النموذج “YOLO11n”، ويستطيع معالجة الصور بسرعة وكفاءة خلال أقل من 7 ميلي ثانية، بمتوسط 0.9 ميلي ثانية للمعالجة المسبقة، و4.6 ميلي ثانية للاستدلال، و1.4 ميلي ثانية للمعالجة اللاحقة لكل صورة. وتكتسب السرعة أهمية خاصة لأن كلاً من الروبوت والكائنات البحرية في حالة حركة مستمرة، كما أن الرؤية غالباً ما تكون محدودة في التطبيقات الواقعية.
ويعمل النموذج بمعالج “Raspberry Pi” مدمج ضمن الروبوت، وهو معالج منخفض التكلفة مقارنة بمعدات الحوسبة الصناعية. ويوضح ستيفانيني سبب اختيار هذا المعالج بقوله: “أردنا التركيز على ذكاء السرب أكثر من التركيز على ذكاء فائق لأي وحدة فردية داخل السرب”. وعلى الرغم من هذه القدرة الحاسوبية المحدودة نسبياً، تستطيع الروبوتات تصنيف الكائنات الحية، وتحليل سلوكها، واكتشاف الحالات غير الطبيعية، وتقدير أعداد نوع معين، وحتى تحديد أعمار الكائنات التي ترصدها.
وقد درّب الباحثون النموذج على التعرّف على ست فئات من الكائنات البحرية، وهي أسماك القرش، والشفنينيات، وقناديل البحر، والدلافين، وحيتان البيلوغا، والأسماك بشكل عام. وقد اختيرت هذه الفئات بشكل متعمد لاختبار أداء النظام، نظراً لتشابه مظهر بعضها تحت الماء.
ولأغراض التدريب، استخدم الباحثون مجموعتي بيانات مفتوحتين هما “Roboflow Aquarium” و”Google Open Images Dataset V7″. كما استكملوا هذه البيانات بصور التُقطت في أحواض مائية في إيطاليا والولايات المتحدة، وبصور للدلافين جُمعت ضمن مبادرة مشروع الدلافين في دولة الإمارات العربية المتحدة، التي تُعنى برصد وحماية تجمعات الدلافين الساحلية في الدولة. كما استُخدمت تطبيقات مثل “Roboflow” و”Makesense” لإدارة البيانات والمساعدة في تصنيف الصور وتغيير أحجامها، إلى جانب التحقق اليدوي من صحة التصنيف في مجموعة البيانات.
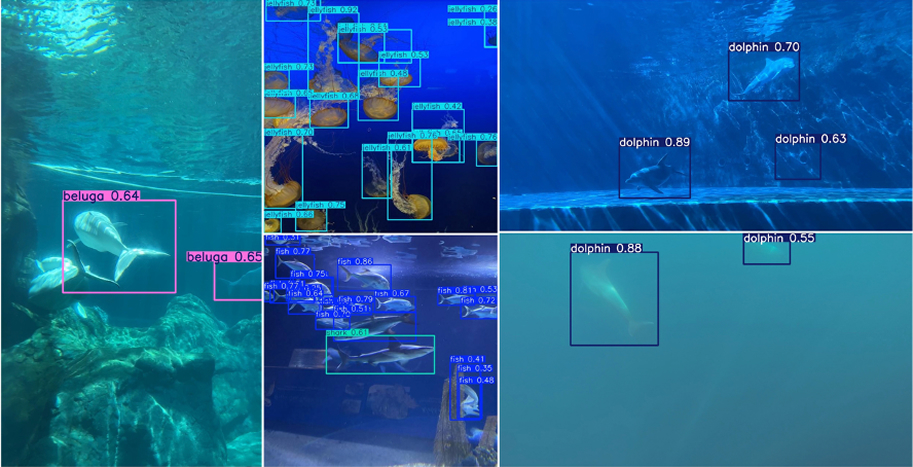
تنبؤات النظام “H-SURF” على عينات من مجموعة الاختبار، كما وردت في دراسة حديثة.
في المجمل، تضمنت مجموعة البيانات أكثر من ألفي صورة جرى تقسيمها إلى مجموعة للتدريب (82%)، ومجموعة للتحقق (12%)، ومجموعة للاختبار (6%). ويشير الباحثون في أحدث دراساتهم إلى أن النظام “H-SURF” حقق أداءً جيداً في تصنيف الكائنات البحرية، حيث بلغ متوسط الدقة 0.78. كما يؤكدون أن الجمع بين شبكة عصبية دقيقة ومنصة روبوتية ذاتية التشغيل “يتيح إجراء تقييم للتنوع البيولوجي في الموقع، مع إمكانية توسيع نطاقه وتنفيذ مهام رصد طويلة الأمد في النظم البيئية البحرية دون الحاجة إلى إشراف بشري مستمر”.
استهلاك الطاقة والآفاق المستقبلية
سيواصل الباحثون عملهم على تطوير النظام “H-SURF”. ومن أبرز القيود التي يواجهها حالياً مسألة استهلاك الطاقة، حيث تستهلك عمليات المعالجة الحاسوبية حالياً طاقة أكبر من حركة الروبوت نفسه، حيث يقول ستيفانيني: “يستهلك الدماغ طاقة أقل بكثير مقارنة بما تستهلكه أجهزة الحاسوب”. ويمكن للإصدار الحالي من النظام العمل لمدة تتراوح بين أربع وخمس ساعات، لكنه يحتاج بعد ذلك إلى إعادة الشحن.
وفي الختام، يؤكد ستيفانيني أن نظام “H-SURF” الذي أنشأه مع فريقه يمثل منصة يمكن للباحثين الآخرين تطويرها من خلال توسيع مجموعة البيانات بهدف دعم استخدامات إضافية في مجالي حماية البيئة وإدارة مزارع الأسماك. كما أنه يأمل أن يسهم أحد طلاب الدكتوراة الجدد في جامعة محمد بن زايد للذكاء الاصطناعي في المرحلة التالية من تطوير النظام بالتعاون مع الجهات التي دعمت المشروع في مراحله الأولى، علماً أن النظام يمثل في وضعه الحالي خطوة مهمة نحو تطوير أنظمة ذاتية التشغيل قادرة على رصد البيئات البحرية التي يواجه الكثير منها تهديدات متزايدة.
أخبار ذات صلة
كيف تساعد البيانات الضخمة والذكاء الاصطناعي في فهم بيولوجيا الإنسان؟
يستعرض إيرَن سيغال، عميد قسم العلوم الحيوية والحياتية في جامعة محمد بن زايد للذكاء الاصطناعي، رؤيته لمستقبل.....
- عميد ,
- computational biology ,
- علم الأحياء الحاسوبي ,
- biology ,
- علم الأحياء ,
- genomics ,
- الجينوميات ,
- HPP ,
- مشروع الصفات الظاهرية للإنسان ,
- Dean ,
- biological and life sciences ,
- العلوم البيولوجية والحياتية ,
- علوم الأحياء وعلوم الحياة ,
ديزين سونغ: من مختبرات الروبوتات إلى إعداد قادة الذكاء الاصطناعي
من تأسيس قسم الروبوتات إلى إعداد قادة الذكاء الاصطناعي المستقبليين، يقود البروفيسور ديزين سونغ جامعة محمد بن.....
- الابتكار ,
- الروبوتات ,
- هيئة تدريسية ,
- OSPA ,
- نائب عميد الجامعة ,

الشبكات العصبية تُحدث نقلة نوعية في التحكم بالروبوتات المرنة وتُوسّع آفاق استخدامها
سيزار ستيفانيني من جامعة محمد بن زايد للذكاء الاصطناعي يعزز التحكم في الروبوتات المرنة عبر مقاربة مدعومة.....
- التحكم ,
- neural networks ,
- الشبكات العصبية ,
- control ,
- ICRA ,
- soft robotics ,
- الروبوتات ,
- الروبوتات المرنة ,
- robotics ,
- المؤتمرات ,
- conference ,