
الشبكات العصبية تُحدث نقلة نوعية في التحكم بالروبوتات المرنة وتُوسّع آفاق استخدامها
الجمعة، 05 يونيو 2026

تمثل الروبوتات المرنة أحد أكثر فروع الروبوتات تطوراً وإثارة للاهتمام في السنوات الأخيرة، إذ تتيح المواد المرنة التي تُصنع منها قدرات حركية يصعب على الروبوتات التقليدية الصلبة مجاراتها. فبفضل غياب الوصلات والمفاصل الميكانيكية التقليدية، تتمتع هذه الروبوتات بحرية حركية أكبر، ما يمنحها القدرة على المناورة داخل البيئات الضيقة والمعقدة. كما أن طبيعتها المرنة تجعلها خياراً أكثر أماناً في التطبيقات التي تتطلب تفاعلاً مباشراً مع البشر، مثل الأذرع الروبوتية المستخدمة في الإجراءات الطبية والتدخلات الجراحية.
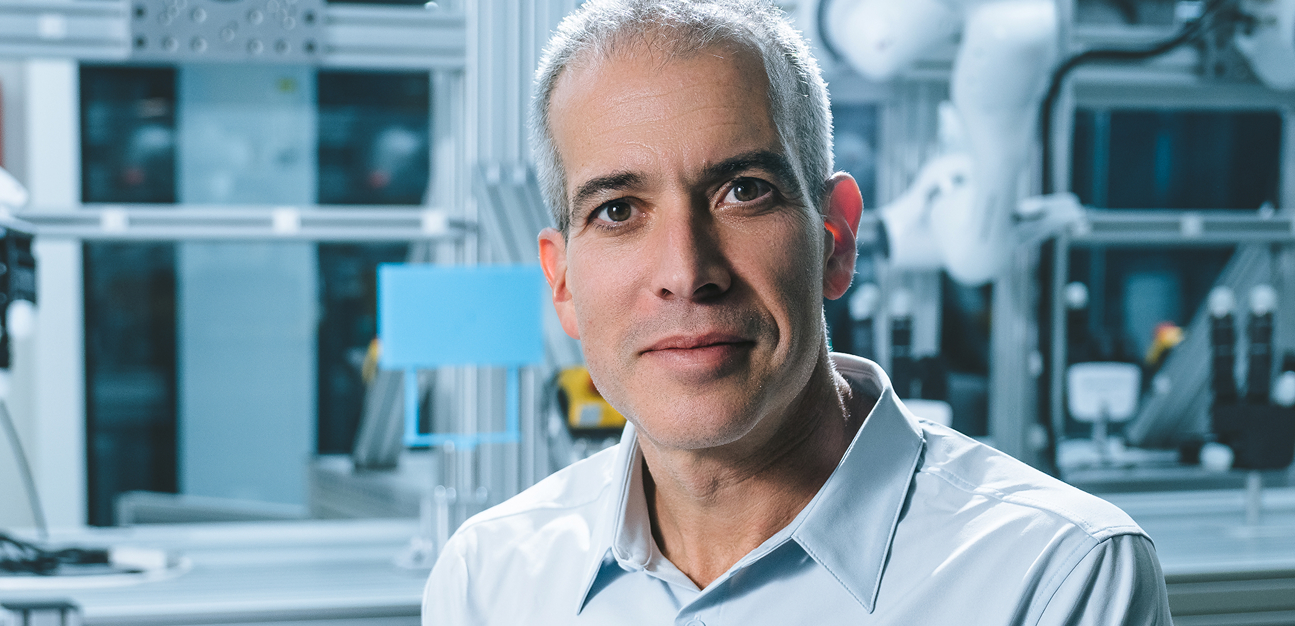
غير أن هذه المرونة التي تمنح الروبوتات المرنة ميزاتها الفريدة تُعد في الوقت ذاته أحد أكبر التحديات أمام التحكم فيها؛ ويشرح البروفيسور سيزار ستيفانيني – أستاذ الروبوتات في جامعة محمد بن زايد للذكاء الاصطناعي – أن هذه الأنظمة، رغم ما تتمتع به من حرية، فإن الاحتكاكات والتشوهات التي تلحق بموادها المرنة بسبب حركتها تُصعِّب نمذجة سلوكها رياضياً بدقة وموثوقية؛ وهنا يبرز الذكاء الاصطناعي بوصفه أداة قادرة على معالجة هذا التعقيد وتوفير حلول أكثر فعالية.
من النماذج الرياضية إلى التعلم من البيانات
يعتمد التحكم في الروبوتات تقليدياً على نهجين رئيسين:
- الأول هو النهج القائم على النماذج الرياضية، والذي يُستخدم عادة في الروبوتات الصلبة العاملة ضمن بيئات يمكن التنبؤ بها، حيث تسمح المعادلات الرياضية بوصف سلوك النظام بدقة عالية.
- أما النهج الثاني، فيستند إلى البيانات الفعلية الناتجة عن حركة الروبوت وأدائه. وفي هذا السياق، تُجمع البيانات المتعلقة بسلوك الروبوت وتُستخدم لتدريب أنظمة تعلم آلي، غالباً ما تكون شبكات عصبية، بهدف تعلم كيفية التحكم بالنظام والتنبؤ باستجابته لمختلف الأوامر.
ويشير ستيفانيني إلى أن الاهتمام بالأساليب المعتمدة على البيانات شهد نمواً متسارعاً خلال السنوات الأخيرة، مدفوعاً بالتقدم الكبير في تقنيات جمع البيانات ومعالجتها من جهة، وبالتعقيد المتزايد في تصميم الروبوتات الحديثة المستوحاة من الطبيعة من جهة أخرى.
ويضيف أن النهج القائم على البيانات بات قادراً على معالجة المشكلات التي تعجز النماذج الرياضية التقليدية عن نمذجتها بدقة، خصوصاً في الأنظمة التي تتسم بسلوك معقد ومتغير.
استراتيجية جديدة للتحكم بالأذرع الروبوتية المرنة
في دراسة حديثة نُشرت في دوريةIEEE Transactions on Robotics عرضت خلال المؤتمر الدولي للروبوتات والأتمتة “ICRA” في العاصمة النمساوية فيينا، شارك ستيفانيني وفريقه البحثي في تطوير مقاربة جديدة للتحكم في الأذرع الروبوتية المرنةاعتماداً على التعلم من البيانات وتخطيط الحركة والوضعية.
واقترح الباحثون استراتيجية للتحكم تعتمد على شبكة عصبية تكرارية من نوع “الذاكرة طويلة وقصيرة الأمد ثنائية الاتجاه (biLSTM)”، وهي بنية متقدمة قادرة على استيعاب العلاقات الزمنية المعقدة والتعلم من تسلسل الأحداث السابقة واللاحقة معاً.
وقد خضعت المنهجية الجديدة لاختبارات متعددة شملت مهام مثل الوصول إلى أهداف محددة وتفادي العوائق أثناء الحركة، حيث أظهرت نتائجها تفوقاً ملحوظاً على عدد من الأساليب المستخدمة حالياً في هذا المجال.
يذكر أن الدراسة البحثية قد شارك في إعدادها كل من الباحثين: زيكسي تشين، وتشينغهوا غوان، وجوزي هيوز، وأريانا مينتشياسي.
كيف تعلّمت الشبكة العصبية سلوك الروبوت؟
اعتمد الباحثون على ذراع روبوتية لينة تتخذ شكلاً أنبوبياً ومقسمة إلى ثلاث وحدات مستقلة. وتمر عبر هذه الوحدات كابلات متصلة بمحركات تسمح بتطبيق القوة على أي وحدة منفردة أو على مجموعة من الوحدات في آن واحد.
ويسهم هذا التصميم في تبسيط عملية التحكم، إذ يمكن التعامل مع كل وحدة كما لو كانت مِفصلاً مستقلاً، ما يحول النظام المعقد إلى مجموعة من الأنظمة الأصغر والأسهل للإدارة.
وقد ظلت، مع هذا، تحديات عدة قائمة كان أبرزها تأثيرات الاحتكاك والتشوهات غير الخطية، إضافة إلى ظاهرة تُعرف باسم “الهسترة” (Hysteresis)، والتي تعني أن الحالة الراهنة للروبوت لا تعتمد فقط على الأوامر المرسلة إليه، بل تتأثر أيضاً بالسلسلة الكاملة للحركات التي أوصلته إلى موضعه الحالي.
وللتعامل مع هذه التحديات، أخضع الباحثون الروبوت لسلسلة واسعة من الحركات باستخدام استراتيجيتين مختلفتين؛ الأولى تعتمد على حركات عشوائية، والثانية على مسارات موجهة ومدروسة.
لقد استخدم الباحثون، خلال هذه التجارب، كاميرات خارجية لتحديد الموقع الفعلي للروبوت بدقة، فيما تولت المشفرات المثبتة في المحركات وحساسات أخرى مدمجة داخل النظام جمع بيانات الاستشعار الداخلية. وبعد مقارنة البيانات الخارجية بالبيانات الداخلية، استُخدمت النتائج لتدريب شبكة biLSTM على فهم ديناميكيات الحركة والتنبؤ بسلوك الروبوت في مختلف الظروف التشغيلية.
كما أدت الشبكة العصبية دور النموذج التنبؤي للنظام، بحيث أصبحت قادرة على تقدير استجابة الروبوت لأي أمر قبل تنفيذه فعلياً.
دقة أكبر واستقلالية أوسع
أظهرت نتائج الدراسة أن المنهجية الجديدة حققت أداءً أفضل في مهام التحكم بالموقع والاتجاه، كما نجحت في تمكين الروبوت من تنفيذ مهام أكثر تعقيداً، من بينها تفادي العوائق أثناء الحركة.
ويؤكد ستيفانيني أن أبرز إنجازات هذه المقاربة يتمثل في تحسين دقة التحكم مقارنة بالحلول التقليدية، مع إمكانية تشغيل الشبكة العصبية مباشرة على الروبوت بفضل صغر حجمها – ويقول: “لا حاجة إلى حواسيب خارجية فائقة القدرة لمعالجة البيانات، وما قد يرافق ذلك من تأخير في الاستجابة، إذ يمكن تنفيذ جميع العمليات على متن الروبوت نفسه”.
وتبرز ميزة إضافية في أن النظام – بعد انتهاء مرحلة التدريب – لم يعد بحاجة إلى الاعتماد على أنظمة التتبع البصري الخارجية، إذ بات قادراً على العمل اعتماداً على بيانات الاستشعار الداخلية وحدها.
تكامل بين الذكاء الاصطناعي والنماذج التقليدية
رغم أن دراسات سابقة استعانت بالشبكات العصبية للتحكم في الروبوتات المرنة، فإن معظم تلك الجهود ركزت على مهام منفردة ومحددة. أما المنهجية الجديدة فتتميز بمرونتها وقدرتها على التكيف مع طيف واسع من المهام المختلفة ضمن إطار تحكم موحد.
ويؤكد ستيفانيني، مع هذا، أن نجاح المقاربات المعتمدة على البيانات لا يعني الاستغناء عن الأسس النظرية التي قامت عليها علوم التحكم الروبوتي على مدى عقود. فالتقدم الحالي، بحسب قوله، يستند إلى المعرفة المتراكمة التي وفرتها النماذج الرياضية التقليدية.
ويختتم قائلاً: “لن نتخلى بالطبع عما تعلمناه سابقاً وهدفنا هو الجمع بين الرؤى التي توفرها النماذج الرياضية والقدرات التي تتيحها الأساليب المعتمدة على البيانات، للوصول إلى أنظمة تحكم أكثر كفاءة ومرونة”.
وتعكس هذه النتائج اتجاهاً متنامياً في عالم الروبوتات، حيث لم يعد الذكاء الاصطناعي مجرد أداة لتحسين الأداء، بل أصبح عنصراً أساسياً في تمكين جيل جديد من الروبوتات القادرة على التكيف مع البيئات المعقدة والعمل بكفاءة أكبر في تطبيقات تمتد من الرعاية الصحية إلى الصناعة والخدمات المتقدمة.
- المؤتمرات ,
- robotics ,
- conference ,
- الروبوتات ,
- neural networks ,
- الشبكات العصبية ,
- control ,
- ICRA ,
- soft robotics ,
- التحكم ,
- الروبوتات المرنة ,
أخبار ذات صلة
كيف تساعد البيانات الضخمة والذكاء الاصطناعي في فهم بيولوجيا الإنسان؟
يستعرض إيرَن سيغال، عميد قسم العلوم الحيوية والحياتية في جامعة محمد بن زايد للذكاء الاصطناعي، رؤيته لمستقبل.....
- genomics ,
- عميد ,
- computational biology ,
- علم الأحياء الحاسوبي ,
- biology ,
- علم الأحياء ,
- الجينوميات ,
- HPP ,
- مشروع الصفات الظاهرية للإنسان ,
- Dean ,
- biological and life sciences ,
- العلوم البيولوجية والحياتية ,
- علوم الأحياء وعلوم الحياة ,
ديزين سونغ: من مختبرات الروبوتات إلى إعداد قادة الذكاء الاصطناعي
من تأسيس قسم الروبوتات إلى إعداد قادة الذكاء الاصطناعي المستقبليين، يقود البروفيسور ديزين سونغ جامعة محمد بن.....
- هيئة تدريسية ,
- الابتكار ,
- الروبوتات ,
- نائب عميد الجامعة ,
- OSPA ,

كيف يمكن لعلم الوراثة اللاّجينية أن يعيد تشكيل مفهوم الرعاية الصحية في الإمارات
طوّر باحثون من جامعة محمد بن زايد للذكاء الاصطناعي إطاراً جديداً قد يساعد أنظمة الرعاية الصحية على.....
- HPP ,
- الرعاية الصحية ,
- طبي ,
- علم الأحياء ,
- مجلة نيتشر ,
- مشروع الصفات الظاهرية للإنسان ,
- EGP ,
- Nature Genetics ,
- برنامج الجينوم ,