
مرونة الطبيعة في خدمة مستقبل تكنولوجيا الروبوتات
الخميس، 23 أكتوبر 2025

تاريخ التصميم والهندسة المستوحاة من الطبيعة في مجال الذكاء الاصطناعي ليس بوليد الأمس، بل إنه قد استوحى فكرته الأولى للشبكات العصبية الاصطناعية من الطريقة التي تنشط بها خلايا الدماغ العصبية. كما أن الباحثين في مجال الروبوتية قد تمكنوا أيضاً من تطوير روبوتات رباعية القوائم قادرة على الجري والقفز والتسلق مستوحاة من كائنات حية.
ويواصل “كي وُو“، الأستاذ الزائر المساعد في علم الروبوتات بجامعة محمد بن زايد للذكاء الاصطناعي، السير على هذا النهج من خلال تصميم روبوتات مرنة مستوحاة من الطبيعة. ويبحث وُو في كيفية توظيف المبادئ المستمدة من الطبيعة والتطور ليس فقط في تصميم الروبوتات والتحكم فيها، بل أيضاً في تطوير أنظمة ذكية قادرة على التعلم والتكيف على نحو يشبه الكائنات الحية.
ويقول وُو: “هناك أوجه تشابه مذهلة وفروق جوهرية بين التعلم البيولوجي والتعلم الاصطناعي؛ ففي الطبيعة، تُشفّر المعرفة وتنتقل وراثياً من جيل إلى آخر، مما يتيح للأنواع أن تتطور تدريجياً عبر الزمن. وبالمثل، يمكن للأنظمة الذكية أن تراكم الخبرات وتحسّن أداءها من خلال التعلم”.
ويضيف: “لكن، وعلى خلاف التطور البيولوجي الذي يتم ببطء ويقتصر على السلالة، يمكن للروبوتات أن تنقل المعلومات أو المهارات المكتسبة فوراً إلى أي روبوت آخر، مما يسرّع عملية التعلم الجماعي والتكيف بشكل كبير”.
عَمِل وُو على العديد من الروبوتات المستوحاة من الطبيعة، بما في ذلك الروبوتات المرنة المتصلة التي تحاكي خراطيم الفيلة والثعابين والأخطبوطات. وتغطي أبحاث وُو محاكاة أشكالا بيولوجية أخرى، حيث يبحث الدكتور في الكيفية التي يمكن بها للهياكل الذكية وأنماط الحركة التي بناها التطور الطبيعي على مدى آلاف السنين أن توجه تصميم الروبوتات والتحكم فيها وآليات تعلمها. ويتيح عمل وُو، من خلال دمج الذكاء الاصطناعي ومبادئ “الذكاء المتجسد”، للروبوتات القدرة على التعلم والتكيف بكفاءة أكبر، ويقدم رؤى جديدة لتطوير أنظمة ذكية أكثر مرونة وارتباطاً بالأسس البيولوجية.
ومن أبرز مشاريعه الحديثة طائرة مسيّرة متعددة الوسائط قادرة على الحركة في الهواء والماء، مستوحاة من خنفساء الغطس، وهي حشرة تستطيع الطيران والسباحة. وسيعرض وُو وزملاؤه التصميم الجديد خلال فعاليات مؤتمر [IEEE/RSJ] الدولي للروبوتات والأنظمة الذكية (IROS 2025) هذا الشهر في مدينة هانغتشو الصينية. يذكر أن الدراسة شارك في إعدادها كل من “جونزه هو” من جامعة كارنيغي ميلون وجامعة سينسيناتي، و”بِنغيو تشين”، و”تيانشيانغ فنغ”، و”يوشوان وين”، و”جانيت دونغ” من جامعة سينسيناتي.
المرونة قوة
يُعد علم الروبوتات اللينة مجالاً ناشئاً يجمع بين الروبوتات والبيونيك وعلوم المواد. ويشهد هذا المجال، مع وتيرة التقدم السريع للذكاء الاصطناعي، تطوراً غير مسبوق لتلبية الطلب المتزايد على أنظمة روبوتية ذكية قادرة على التكيف وموفرة للطاقة. ويصف وُو هذا المجال بأنه حقل بحثي قوي النشاط يقترح فيه الباحثون أفكاراً جديدة ويختبرونها باستمرار وبوتيرة متسارعة.
وبشكل عام، فعندما يسمع الناس كلمة “روبوت”، غالباً ما يتبادر إلى أذهانهم ما يُعرف بالروبوتات الصلبة، المصنوعة من مواد قاسية وتعتمد على مفاصل ميكانيكية للحركة. وقد استُخدمت هذه الروبوتات – بالفعل – لعقود في بيئات متحكم فيها مثل المستودعات وخطوط الإنتاج. ورغم دقة هذه الروبوتات وقوتها، فإن اعتمادها على المفاصل الميكانيكية الصلبة يقيّد حرية حركتها ويقلل من مرونتها، مما يجعلها أقل ملاءمة للتفاعل الآمن مع البشر.
وفي المقابل، تتميز الروبوتات اللينة بدرجة عالية من الحرية والمرونة والقدرة على التكيف، ما يمنحها قدرة أكبر على الحركة والعمل في بيئات لا تستطيع الروبوتات الصلبة التعامل معها؛ فعلى سبيل المثال، يمكنها البحث عن ناجين تحت الأنقاض بعد الزلازل عبر تكييف هياكلها المرنة للمرور في المساحات الضيقة. كما تستطيع الروبوتات المرنة المتصلة – في التطبيقات الطبية – التحرك داخل جسم الإنسان مما يمكن من إجراء عمليات دقيقة يصعب تنفيذها باستخدام الروبوتات التقليدية.
وبفضل تصنيعها من مواد لينة تتميز الروبوتات المرنة أيضاً بمستويات أمانها العالية في الحالات التي تستدعي تعاملها المباشر مع الإنسان.
خنفساء الغطس تلهم ثورة في تصميم الطائرات المسيّرة
استلهم وُو وفريقه تصميمهم من خنافس الغطس لقدرتها على الحركة بكفاءة في الهواء والماء باستخدامها أولاً لأجنحتها للطيران في الهواء، واعتمادها ثانياً على شعيرات أرجلها للمساعدة في السباحة عند دخولها وسطا مائيا.
اعتمد الفريق في تطويره للطائرة المسيّرة على تصميم تقليدي ذي أربع مراوح، غير أنهم استبدلوا التصميم التقليدي بما أسموه بـ “وحدة دفع ذات صلابة متغيرة”، حيث تكون مراوح [أذرع] الطائرة صلبة في الهواء، وعند دخولها الماء تصبح مرنة، مما يساعد المسيرة في الدفع بنفسها في الماء بحركة تشبه السباحة.
يُعد هذا أول تصميم لطائرة مسيّرة يستبدل فيه الإطار الصلب التقليدي بـ “وحدة دفع ذات صلابة متغيرة”، ما يمكّنها من الحركة في الهواء والماء معاً.
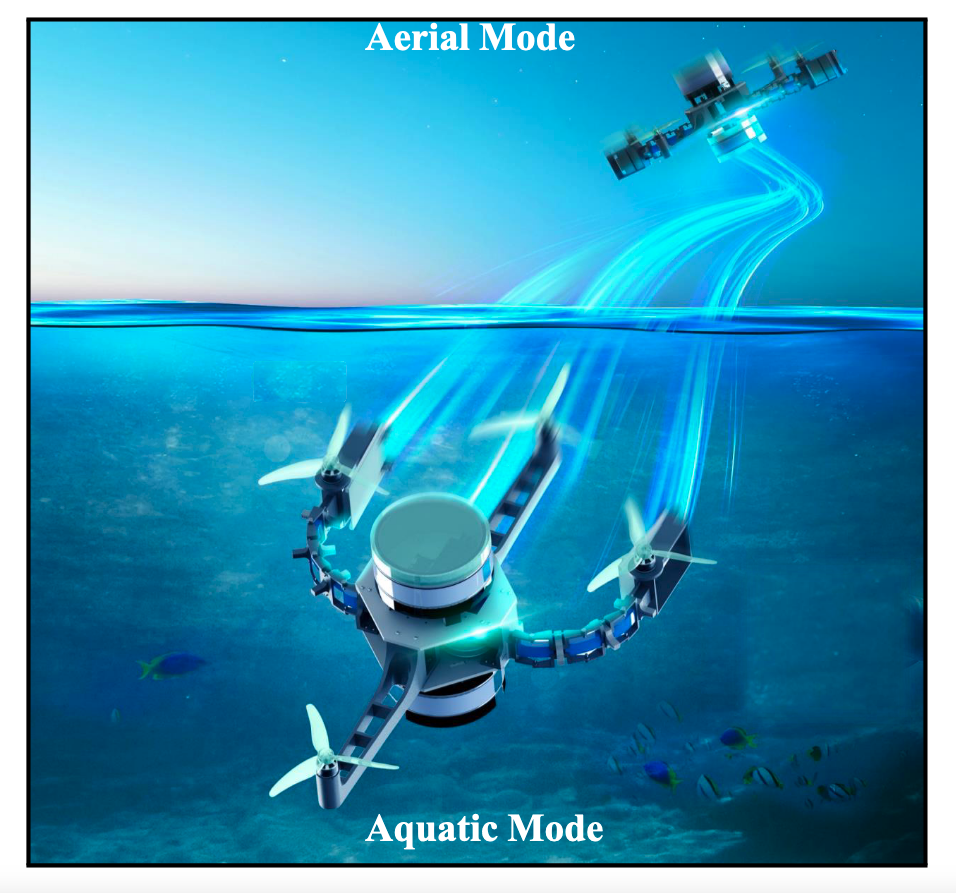
تصميم مبتكر لطائرة مسيّرة جَو– مائية مستوحاة من خنفساء الغطس، قادرة على الطيران والسباحة.
تتحقق ميزة الصلابة المتغيرة للمراوح [للأذرع] بفضل مادة الغاليوم (gallium)، وهو معدن ينصهرعن نقطة انصهار منخفض. بحيث أنه عند دخول الطائرة الماء، يرفع جهاز التسخين الذي تم تزويد الطائرة به درجة حرارة الغاليوم فوق نقطة انصهاره، فيصبح مرناً ويسمح للطائرة بالسباحة.
ويقول وُو إن الباحثين واجهوا تحديات عِدة خلال عمليات تطوير هذه المسيرة، كان أبرزها كيفية جعل الروبوت يدرك ويستشعر الانتقال من الهواء إلى الماء، والتعرف بدقة على تغيرات الحرارة، والتحكم في جهاز التسخين في الوقت الفعلي لضمان انتقال سلس وفي الوقت المناسب من الحالة الصلبة إلى الحالة المرنة. كما كان عليهم إيجاد طريقة للتحكم الدقيق في درجة حرارة الغاليوم داخل الأذرع.
ويضيف وُو موضحاً أنه: “في حال أصبحت الأذرع مرنة أكثر من اللازم أثناء الطيران، فقد يؤدي ذلك إلى فقدان منظومة المسيّرة استقرارها وحدوث اهتزازات قد تفضي إلى سقوطها”.
اختبر الباحثون قدرات الطائرة في الطيران والسباحة للتحقق من كفاءة التصميم وموثوقيته. وقد أظهر النموذج الأولي قدرة على الطيران المستقر لأكثر من 15 دقيقة، وحقق سرعة سباحة بلغت 77 مليمتر في الثانية. بشكل عام، يقدم هذا العمل نهجاً مبتكراً للتحكم في الصلابة المتغيرة التكيفية، حيث يحافظ على الصلابة في الهواء والمرونة في الماء، مما يتيح انتقالاً سلساً بين بيئتين مختلفتين تماماً، ويمثل خطوة مهمة نحو تطوير روبوتات جَو–مائية متعددة الاستخدامات.
التعلم والتكيف والتطور
يمكن أن تسهم نتائج العمل الذي قام به الفريق في تطوير تصميم الطائرات المسيّرة الجو–مائية لاستخدامها في مهام الإنقاذ وعمليات الرصد البيئي والبحوث البحرية. لكن ما تزال هناك حاجة إلى مزيد من التطوير قبل تشغيل النظام في البيئات الحقيقية. ويخطط الباحثون لتحسين استراتيجية التحكم في الطائرة لتعزيز استقرار الطيران، وبحث وتطوير طرق لتحسين كفاءة الطاقة، إذ يستهلك تسخين الغاليوم حالياً جزءاً كبيراً من طاقة البطارية.
وبشكل عام، يقول وُو إن الهدف طويل المدى هو تطوير أنظمة روبوتية ذكية تتعلم بكفاءة، وتكتسب سلوكيات مفيدة، وتتأقلم باستمرار مع بيئات جديدة، لتشكّل نموذجاً موحداً لتطور المهارات والبنية. كما يهدف وُو من خلال أبحاثه التي تدمج الذكاء الاصطناعي والذكاء المتجسد مع مبادئ البيولوجيا وعلوم المواد إلى ابتكار روبوتات لا تتحرك وتتفاعل مثل الكائنات الحية فحسب، بل تتطور أيضاً في أشكالها الفيزيائية وقدراتها الإدراكية، بما يقربنا من آلات ذكية وقابلة للتكيف بحق.
- المؤتمرات ,
- الروبوتات ,
- متعدد الوسائط ,
- IROS ,
- جو-مائية ,
- المسيرات ,
- الهندسة المستوحاة من الطبيعة ,
أخبار ذات صلة

جامعة محمد بن زايد للذكاء الاصطناعي تعلن عن شراكة بحثية استراتيجية مع "مينيرفا هيومانويدز" لتطوير روبوتات بشرية لتطبيقات قطاع الطاقة
تجسّد هذه الشراكة جسراً يربط بين أبحاث الذكاء الاصطناعي التأسيسية والتطبيقات الصناعية.
اقرأ المزيد
الذكاء الاصطناعي وكيف تخيله الفن السابع على مر العقود
لطالما استخدم صانعو الأفلام الذكاء الاصطناعي للتعبير عن آمال البشر ومخاوفهم، وطرح أسئلة جوهرية عن معنى الإنسانية.
- الخيال العلمي ,
- الخيال ,
- السينما ,
- الفن السابع ,
- الذكاء الاصطناعي ,
عمليات تفتيش أسرع وأكثر أماناً وذكاءً: الروبوتات المدعومة بالذكاء الاصطناعي لتعزيز السلامة الصناعية
تم تصميم النظام الروبوتي المستقل التابع لجامعة محمد بن زايد للذكاء الاصطناعي، "لايكا"، للدخول إلى البيئات الصناعية.....
- الطاقة ,
- البنية التحتية ,
- دراسات حالة ,
- الروبوتات ,