
From sky to sea: A biologically inspired aerial–aquatic robot
Thursday, October 23, 2025

There is a long history of biologically inspired design and engineering in AI. The initial concept of the artificial neural network was roughly based on the way neurons in a brain activate in response to a stimulus. More recently, researchers have built four-legged robots that can run, jump, and climb like a dog or mountain lion.
Ke Wu, Visiting Assistant Professor of Robotics at MBZUAI, is continuing this tradition by designing soft, bio-inspired robots that draw inspiration from evolutionary processes. Wu explores how principles from nature and evolution can inform not only the physical design and control of robots but also the development of intelligent systems that can learn and adapt in ways similar to living organisms.
“There are fascinating similarities and fundamental differences between biological and artificial learning,” Wu says. “In nature, knowledge is encoded and passed down genetically from one generation to the next, allowing species to evolve gradually over time. Similarly, intelligent systems can accumulate experience and improve their performance through learning.”
“However, unlike biological evolution, where knowledge transfer is slow and limited to descendants, robots can instantly deploy learned information or skills to any other robot, greatly accelerating collective learning and adaptation.”
Wu has worked on many bio-inspired robots, including soft continuum robots modeled after elephant trunks, snakes, and octopuses. His research extends beyond biological forms to explore how structural intelligence and movement patterns shaped by evolution can guide robot design, control, and learning. By integrating AI and the principles of embodied intelligence, Wu’s work enables robots to learn and adapt more efficiently while offering new insights for developing more adaptive, biologically grounded intelligent systems.
One of his recent projects is a transmedia drone that is designed to move in both air and water and is inspired by the diving beetle, an insect that can fly and swim.
Wu and colleagues will present their new design at this year’s IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025) this month in Hangzhou, China.
Junzhe Hu, of Carnegie Mellon University and the University of Cincinnati, and Pengyu Chen, Tianxiang Feng, Yuxuan Wen, and Janet Dong of the University of Cincinnati, are co-authors of the study.
Flexibility as strength
Soft robotics is an emerging field that combines robotics, bionics, and materials science. With the rapid advancement of AI, the field is evolving at an unprecedented pace to meet growing demands for intelligent, adaptable, and energy efficient robotic systems. Wu describes it as an extremely active area of research in which researchers are rapidly proposing and exploring new ideas.
When people hear the word “robot,” they most likely think of what is known as a rigid robot. These are built out of hard materials and use mechanical joints to move.
Rigid robots have been used for decades in controlled and controlled environments, like warehouses and factory floors. While rigid robots are precise and powerful, their reliance on rigid mechanical joints constrains their degrees of freedom and maneuverability, resulting in limited compliance and reduced suitability for safe and intuitive human–robot interaction.
Alternatively, soft robots, with their high degrees of freedom, compliance, and adaptability, can move more freely and operate in environments that rigid robots can’t.
For instance, after an earthquake, a soft robot could search for survivors trapped under rubble by deforming to fit through narrow spaces. In medical applications, soft continuum robots can navigate within the human body with minimal invasiveness, enabling delicate procedures that would be difficult or unsafe for traditional rigid robots.
Moreover, because they are made of supple and flexible materials, soft robots can be safer in situations where they might encounter people.
Lessons from the diving beetle
Wu and his team looked to diving beetles because they can move efficiently in both air and water. These bugs use their wings to fly in the air; when they enter the water, they use hairs on their legs to help them swim.
The team’s design is based on a quadcopter drone but replaces the traditional design with what they call a variable-stiffness propulsion module. In the air, the arms of the drone are rigid. When the drone enters the water, two of the arms become flexible, allowing it to propel itself with a swimming motion.
It’s the first drone design that replaces the traditional, rigid frame of a quadcopter with a variable-stiffness propulsion module that allows it to move in both air and water.
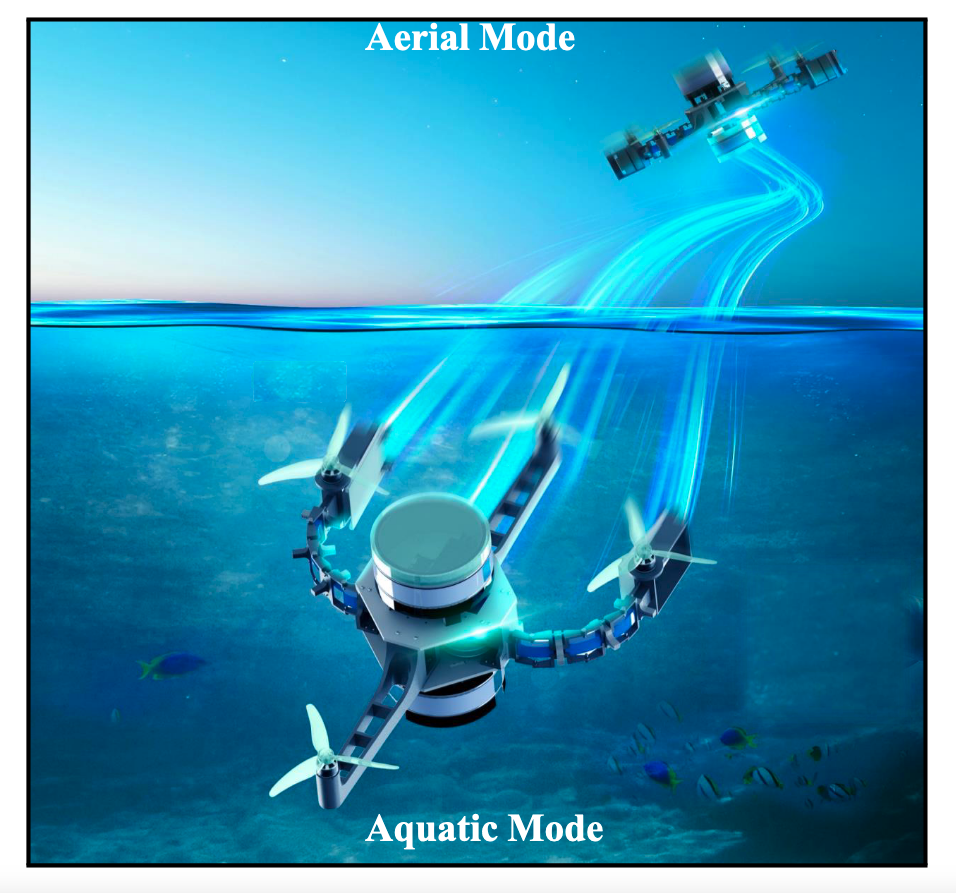
Design concept of an aerial–aquatic drone inspired by the diving beetle that can both fly and swim.
The varying stiffness of the arms is made possible by a material called gallium, a metal that has a low melting point. When the drone enters the water, a heating element raises the temperature of the gallium beyond its melting point, making it flexible and allowing it to swim.
Wu says the researchers faced several challenges during development. Perhaps the most difficult was enabling the robot to sense the transition from air to water, accurately perceive temperature changes, and precisely regulate the heating element in real time to achieve a smooth and timely transformation from a rigid to a flexible state.
They also had to figure out how to precisely control the temperature of the gallium in the arms. “If the arms become too flexible while it is flying, the robotic system can become unstable, leading to vibrations and loss of balance, and it could fall out of the sky,” Wu says.
The researchers tested both the flying and swimming capabilities of their drone to validate the functionality and reliability of the design. The prototype demonstrated stable flight for over 15 minutes and achieved a swimming speed of 77 millimeters per second.
Overall, the work showcases a novel approach to adaptive rigidity control, maintaining stiffness in the air and flexibility in the water, which enables seamless transition between two vastly different environments and represents a significant step toward the development of truly versatile aerial and aquatic robots.
Learning, adapting, evolving
The team’s findings have the potential to advance the design of aerial and aquatic drones for rescue missions, environmental monitoring, and marine research. Further development is needed, however, before the system can be deployed in real-world settings.
The researchers plan to refine the drone’s control strategy to enhance flight stability and explore ways to improve energy efficiency, as heating the gallium currently consumes a substantial portion of the battery power.
More broadly, Wu says that his long-term goal is to develop intelligent robotic systems that learn efficiently, inherit useful behaviors, and continuously adapt to new environments, forming a unified model of skill and structural evolution. By integrating AI and embodied intelligence with principles from biology and materials science, his research aims to create robots that not only move and interact like living organisms but also evolve in their physical forms and cognitive capabilities, advancing toward truly adaptive and intelligent machines.
- robotics ,
- conference ,
- IROS ,
- drone ,
- transmedia ,
- aerial ,
- aquatic ,
- bio-inspired ,
Related

At robotics’ “take-off moment”, Dezhen Song is helping shape the future at MBZUAI
From building MBZUAI's robotics department to developing the next generation of AI talent, Professor Dezhen Song is.....
- vice provost ,
- OSPA ,
- faculty ,
- robotics ,
- innovation ,

How neural networks are making soft robots easier to control
MBZUAI's Cesare Stefanini has helped develop a new AI-driven control strategy that helps soft robotic arms move.....
- control ,
- soft robotics ,
- ICRA ,
- neural networks ,
- conference ,
- robotics ,

Commencement 2026: Hard work and soft robotics
From online courses to advanced research, Ibrahim Alsarraj’s rapid rise mirrors the growth of MBZUAI’s robotics department,.....
- research ,
- graduate ,
- robotics ,
- alumni ,
- Ph.D. ,
- M.Sc. ,
- commencement ,
- Commencement 2026 ,